
[Algorithm] 다익스트라 알고리즘(Dijkstra)
1. 최단 경로 문제
- 최단 경로 문제란?
- 두 노드를 잇는 가장 짧은 경로를 찾는 문제
- 가중치 그래프(Weighted Graph)에서 간선(Edge)의 가중치 합이 최소가 되도록 하는 경로를 찾는 것
- 최단 경로 문제 종류
-
단일 출발 및 단일 도착 최단 경로
- 그래프 내의 특정 노드 u에서 출발, 또다른 특정 노드 v에 도착하는 가장 짧은 경로를 찾는 문제
-
단일 출발 최단 경로
- 그래프 내의 특정 노드 u와 그래프 내 다른 모든 노드 각각의 가장 짧은 경로를 찾는 문제
예를 들어 A, B, C, D 라는 노드를 가진 그래프에서 특정 노드를 A 라고 한다면, A 외 모든 노드인 B, C, D 각 노드와 A 간에 (즉, A - B, A - C, A - D) 각각 가장 짧은 경로를 찾는 문제
- 전체 쌍 최단 경로
- 그래프 내의 모든 노드 쌍 (u, v) 에 대한 최단 경로를 찾는 문제
2. 다익스트라(Dijkstra) 알고리즘
- 다익스트라 알고리즘은 위의 최단 경로 문제 종류 중, 두 번째에 해당
- 하나의 정점에서 다른 모든 정점 간의 각각 가장 짧은 거리를 구하는 문제
- 다익스트라 알고리즘 로직
- 첫 정점을 기준으로 연결되어 있는 정점들을 추가해 가며, 최단 거리를 갱신하는 기법
-
너비우선탐색(BFS)와 유사
-
첫 정점부터 각 노드간의 거리를 저장하는 배열을 만든 후, 첫 정점의 인접 노드 간의 거리부터 먼저 계산하면서, 첫 정점부터 해당 노드간의 가장 짧은 거리를 해당 배열에 업데이트
다익스트라 알고리즘의 다양한 변형 로직이 있지만, 가장 개선된 우선순위 큐를 사용하는 방식에 집중
-
- 우선순위 큐를 활용한 다익스트라 알고리즘
- 우선순위 큐는 MinHeap 방식을 활용해서, 현재 가장 짧은 거리를 가진 노드 정보를 먼저 꺼냄
- 첫 정점을 기준으로 배열을 선언하여 첫 정점에서 각 정점까지의 거리를 저장
- 초기에는 첫 정점의 거리는 0, 나머지는 무한대로 저장 (inf 라고 표현함)
- 우선순위 큐에 (첫 정점, 거리 0) 만 먼저 넣음
- 우선순위 큐에서 노드를 꺼냄
- 처음에는 첫 정점만 저장되어 있으므로, 첫 정점이 꺼내짐
- 첫 정점에 인접한 노드들 각각에 대해, 첫 정점에서 각 노드로 가는 거리와 현재 배열에 저장되어 있는 첫 정점에서 각 정점까지의 거리를 비교
- 배열에 저장되어 있는 거리보다, 첫 정점에서 해당 노드로 가는 거리가 더 짧을 경우, 배열에 해당 노드의 거리를 업데이트
- 배열에 해당 노드의 거리가 업데이트된 경우, 우선순위 큐에 넣음
- 결과적으로 너비 우선 탐색 방식과 유사하게, 첫 정점에 인접한 노드들을 순차적으로 방문
- 만약 배열에 기록된 현재까지 발견된 가장 짧은 거리보다, 더 긴 거리(루트)를 가진 (노드, 거리)의 경우에는 해당 노드와 인접한 노드간의 거리 계산을 하지 않음
- 2번의 과정을 우선순위 큐에 꺼낼 노드가 없을 때까지 반복
- 우선순위 큐는 MinHeap 방식을 활용해서, 현재 가장 짧은 거리를 가진 노드 정보를 먼저 꺼냄
- 다익스트라 알고리즘 예제 (우선순위 큐)
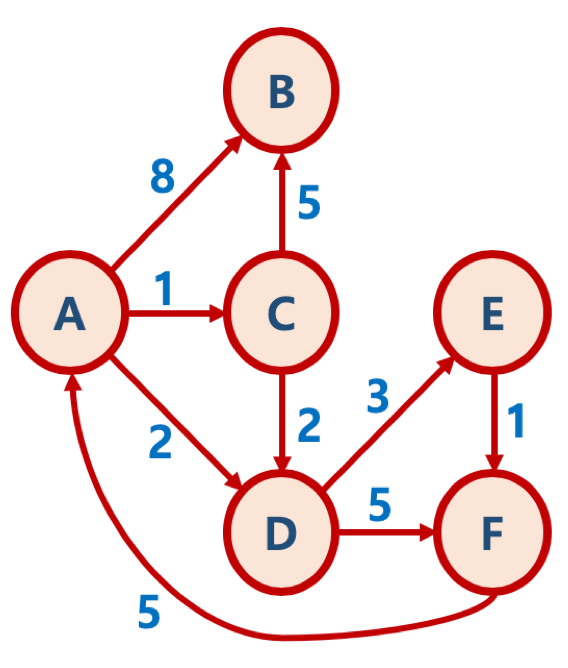
@1. 초기화
- 첫 정점을 기준으로 배열을 선언하여 첫 정점에서 각 정점까지의 거리를 저장
- 초기에는 첫 정점의 거리는 0, 나머지는 무한대로 저장 (inf 라고 표현)
- 우선순위 큐에 (첫 정점, 거리 0) 만 먼저 넣음

@2. 우선순위 큐에서 추출한 (A, 0) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 우선순위 큐에서 노드를 꺼냄
- 처음에는 첫 정점만 저장되어 있으므로, 첫 정점이 꺼내짐
- 첫 정점에 인접한 노드들 각각에 대해, 첫 정점에서 각 노드로 가는 거리와 현재 배열에 저장되어 있는 첫 정점에서 각 정점까지의 거리를 비교
- 배열에 저장되어 있는 거리보다, 첫 정점에서 해당 노드로 가는 거리가 더 짧을 경우, 배열에 해당 노드의 거리를 업데이트
- 배열에 해당 노드의 거리가 업데이트된 경우, 우선순위 큐에 넣음
- 결과적으로 너비 우선 탐색 방식과 유사하게, 첫 정점에 인접한 노드들을 순차적으로 방문
- 만약 배열에 기록된 현재까지 발견된 가장 짧은 거리보다, 더 긴 거리(루트)를 가진 (노드, 거리)의 경우에는 해당 노드와 인접한 노드간의 거리 계산을 하지 않음
이전 표에서 보듯이, 첫 정점 이외에 모두 inf 였었으므로, 첫 정점에 인접한 노드들은 모두 우선순위 큐에 들어가고, 첫 정점과 인접한 노드간의 거리가 배열에 업데이트
@3. 우선순위 큐에서 (C, 1) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 우선순위 큐가 MinHeap(최소 힙) 방식이므로, 위 표에서 넣어진 (C, 1), (D, 2), (B, 8) 중 (C, 1) 이 먼저 추출
- 위 표에서 보듯이 1단계까지의 A - B 최단 거리는 8인 상황
- A - C 까지의 거리는 1, C 에 인접한 B, D에서 C - B는 5, 즉 A - C - B 는 1 + 5 = 6 이므로, A - B 최단 거리 8보다 더 작은 거리를 발견, 이를 배열에 업데이트
- 배열에 업데이트했으므로 B, 6 (즉 A에서 B까지의 현재까지 발견한 최단 거리) 값이 우선순위 큐에 넣어짐
- C - D 의 거리는 2, 즉 A - C - D 는 1 + 2 = 3 이므로, A - D의 현재 최단 거리인 2 보다 긴 거리, 그래서 D 의 거리는 업데이트되지 않음
- A - C 까지의 거리는 1, C 에 인접한 B, D에서 C - B는 5, 즉 A - C - B 는 1 + 5 = 6 이므로, A - B 최단 거리 8보다 더 작은 거리를 발견, 이를 배열에 업데이트

@4. 우선순위 큐에서 (D, 2) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- 지금까지 접근하지 못했던 E와 F 거리가 계산
- A - D 까지의 거리인 2 에 D - E 가 3 이므로 이를 더해서 E, 5
- A - D 까지의 거리인 2 에 D - F 가 5 이므로 이를 더해서 F, 7

@5. 우선순위 큐에서 (E, 5) [노드, 첫 노드와의 거리] 를 기반으로 인접한 노드와의 거리 계산
- A - E 거리가 5인 상태에서, E에 인접한 F를 가는 거리는 1, 즉 A - E - F 는 5 + 1 = 6, 현재 배열에 A - F 최단거리가 7로 기록되어 있으므로, F, 6 으로 업데이트
- 우선순위 큐에 F, 6 추가

@6. 우선순위 큐에서 (B, 6), (F, 6) 를 순차적으로 추출해 각 노드 기반으로 인접한 노드와의 거리 계산
- 예제의 방향 그래프에서 B 노드는 다른 노드로 가는 루트가 없음
- F 노드는 A 노드로 가는 루트가 있으나, 현재 A - A 가 0 인 반면에 A - F - A 는 6 + 5 = 11, 즉 더 긴 거리이므로 업데이트되지 않음

@7. 우선순위 큐에서 (F, 7), (B, 8) 를 순차적으로 추출해 각 노드 기반으로 인접한 노드와의 거리 계산
- A - F 로 가는 하나의 루트의 거리가 7 인 상황이나, 배열에서 이미 A - F 로 가는 현재의 최단 거리가 6인 루트의 값이 있는 상황이므로, 더 긴거리인 F, 7 루트 기반 인접 노드까지의 거리는 계산할 필요가 없음, 그래서 계산없이 스킵
- 계산하더라도 A - F 거리가 6인 루트보다 무조건 더 긴거리가 나올 수 밖에 없음
- B, 8 도 현재 A - B 거리가 6이므로, 인접 노드 거리 계산이 필요 없음
우선순위 큐를 사용하면 불필요한 계산 과정을 줄일 수 있음

- 우선순위 큐 사용 장점
- 지금까지 발견된 가장 짧은 거리의 노드에 대해서 먼저 계산
- 더 긴 거리로 계산된 루트에 대해서는 계산을 스킵할 수 있음
3. 다익스트라 알고리즘 파이썬 구현 및 테스트
- 참고 : heapq 라이브러리 활용을 통해 우선순위 큐 사용
- 데이터가 리스트 형태일 경우, 0번 인덱스를 우선순위로 인지, 우선순위가 낮은 순서대로 pop 할 수 있음
# 우선순위 큐 예제
import heapq
queue = []
heapq.heappush(queue, [2, 'A'])
heapq.heappush(queue, [5, 'B'])
heapq.heappush(queue, [1, 'C'])
heapq.heappush(queue, [7, 'D'])
print(queue) # [[1, 'C'], [5, 'B'], [2, 'A'], [7, 'D']]
for index in range(len(queue)) :
print(heapq.heappop(queue)) # [1, 'C']
# [2, 'A']
# [5, 'B']
# [7, 'D']
# 다익스트라 알고리즘
# 탐색할 그래프의 시작 정점과 다른 정점들간의 최단 거리 구하기
mygraph = {
'A' : {'B': 8, 'C': 1, 'D': 2},
'B' : {},
'C' : {'B': 5, 'D': 2},
'D' : {'E': 3, 'F': 5},
'E' : {'F': 1},
'F' : {'A': 5}
}
import heapq
def dijkstra(graph, start) :
distances = {node : float('inf') for node in graph}
distances[start] = 0
queue = []
heapq.heappush(queue, [distances[start], start])
while queue :
current_distance, current_node = heapq.heappop(queue)
if distances[current_node] < current_distance :
continue
for adjacent, weight in graph[current_node].items() :
distance = current_distance + weight
if distance < distances[adjacent] :
distances[adjacent] = distance
heapq.heappush(queue, [distance, adjacent])
return distances
dijkstra(mygraph, 'A') # {'A': 0, 'B': 6, 'C': 1, 'D': 2, 'E': 5, 'F': 6}
# 참고 : 최단 경로 출력
# 탐색할 그래프의 시작 정점과 다른 정점들간의 최단 거리 및 최단 경로 출력
import heapq
# 탐색할 그래프와 시작 정점을 인수로 전달
def dijkstra(graph, start, end):
# 시작 정점에서 각 정점까지의 거리를 저장할 딕셔너리를 생성하고, 무한대(inf)로 초기화
distances = {vertex: [float('inf'), start] for vertex in graph}
# 그래프의 시작 정점의 거리는 0으로 초기화
distances[start] = [0, start]
# 모든 정점이 저장될 큐를 생성
queue = []
# 그래프의 시작 정점과 시작 정점의 거리(0)을 최소힙에 넣어줌
heapq.heappush(queue, [distances[start][0], start])
while queue:
# 큐에서 정점을 하나씩 꺼내 인접한 정점들의 가중치를 모두 확인하여 업데이트
current_distance, current_vertex = heapq.heappop(queue)
# 더 짧은 경로가 있다면 무시
if distances[current_vertex][0] < current_distance:
continue
for adjacent, weight in graph[current_vertex].items():
distance = current_distance + weight
# 만약 시작 정점에서 인접 정점으로 바로 가는 것보다 현재 정점을 통해 가는 것이 더 가까울 경우에는
if distance < distances[adjacent][0]:
# 거리를 업데이트
distances[adjacent] = [distance, current_vertex]
heapq.heappush(queue, [distance, adjacent])
path = end
path_output = end + '->'
while distances[path][1] != start:
path_output += distances[path][1] + '->'
path = distances[path][1]
path_output += start
print (path_output)
return distances
# 방향 그래프
mygraph = {
'A': {'B': 8, 'C': 1, 'D': 2},
'B': {},
'C': {'B': 5, 'D': 2},
'D': {'E': 3, 'F': 5},
'E': {'F': 1},
'F': {'A': 5}
}
print(dijkstra(mygraph, 'A', 'F')) # F->E->D->A
# {'A': [0, 'A'], 'B': [6, 'C'], 'C': [1, 'A'], 'D': [2, 'A'], 'E': [5, 'D'], 'F': [6, 'E']}
4. 시간 복잡도
- 다익스트라 알고리즘은 크게 다음 두 가지 과정을 거침
- 과정1 : 각 노드마다 인접한 간선들을 모두 검사하는 과정
- 과정2 : 우선순위 큐에 노드/거리 정보를 넣고 삭제(pop)하는 과정
-
각 과정별 시간 복잡도
-
과정1 : 각 노드는 최대 한 번씩 방문하므로 (첫 노드와 해당 노드간의 갈 수 있는 루트가 있는 경우만 해당), 그래프의 모든 간선은 최대 한 번씩 검사
- 즉, 각 노드마다 인접한 간선들을 모두 검사하는 과정은 O(E) 시간이 걸림
-
과정2 : 우선순위 큐에 가장 많은 노드, 거리 정보가 들어가는 경우, 우선순위 큐에 노드/거리 정보를 넣고, 삭제하는 과정이 최악의 시간이 걸림
- 우선순위 큐에 가장 많은 노드, 거리 정보가 들어가는 시나리오는 그래프의 모든 간선이 검사될 때마다, 배열의 최단 거리가 갱신되고, 우선순위 큐에 노드/거리가 추가
- 이 때 추가는 각 간선마다 최대 한 번 일어날 수 있으므로, 최대 O(E)의 시간이 걸리고, O(E) 개의 노드/거리 정보에 대해 우선순위 큐를 유지하는 작업은 $ O(log{E}) $ 가 걸림
- 따라서 해당 과정의 시간 복잡도는 $ O(Elog{E}) $
-
- 총 시간 복잡도
- 과정1 + 과정2 = O(E) + $ O(Elog{E}) $ = $ O(E + Elog{E}) = O(Elog{E}) $
- 참고 : 힙의 시간 복잡도
- depth (트리의 높이) 를 h라고 표기한다면,
- n개의 노드를 가지는 heap 에 데이터 삽입 또는 삭제시, 최악의 경우 root 노드에서 leaf 노드까지 비교해야 하므로 h=log2n 에 가까우므로, 시간 복잡도는 O(logn)
댓글남기기